
















R.E.News future Technology-AUVs and Underwater Sensor Networks Team Up for Precision Tracking
 07/11/25-FR-English-NL-footer
07/11/25-FR-English-NL-footer
Quand les AUV et les réseaux de capteurs sous-marins unissent leurs forces pour un suivi de précision
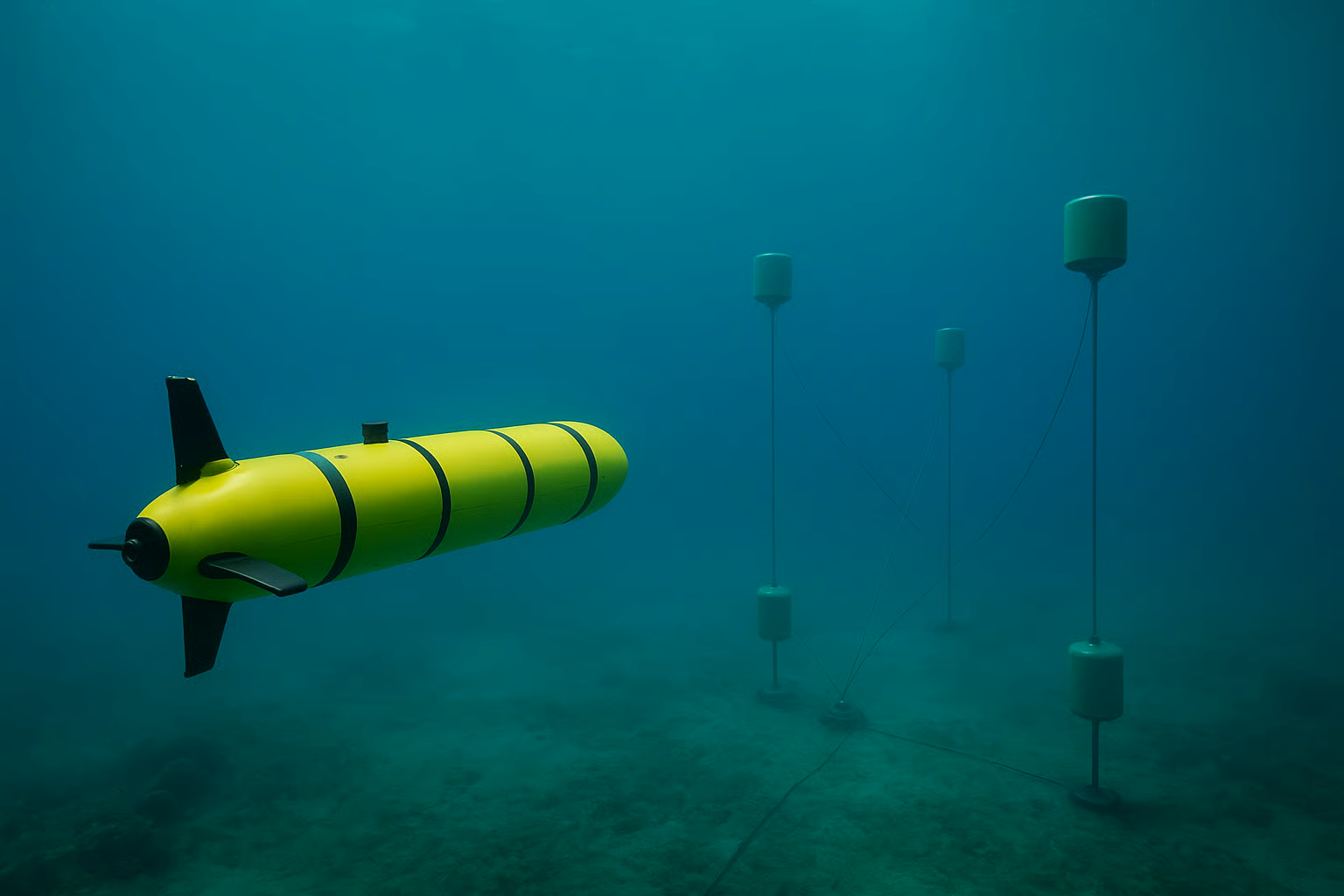 Image-R.E.News©
Image-R.E.News©
Sous la surface, le monde marin n’a rien d’un terrain de jeu docile. Entre la faible visibilité, les conditions acoustiques capricieuses et les enjeux critiques — de la défense à l’énergie offshore —, suivre un objet sous l’eau relève souvent de la prouesse technologique.
Aujourd’hui, une collaboration internationale vient de franchir un cap décisif : des chercheurs ont mis au point une approche novatrice associant véhicules sous-marins autonomes (AUV) et réseaux de capteurs sous-marins (USN). Ensemble, ils promettent de transformer le suivi en temps réel des cibles subaquatiques.
Menée par des experts du Ocean College de l’Université des Sciences et Technologies du Jiangsu, de l’Auckland University of Technology et de l’Institut de recherche maritime de Wuhan, l’étude propose une méthode qui améliore à la fois la précision du suivi et la sobriété énergétique des réseaux.
Le secret ? Un algorithme de nouvelle génération : le Time-Delay Compensated Extended Kalman Filter (TD-CEKF), capable de compenser les décalages temporels des signaux acoustiques tout en minimisant la charge de calcul. Résultat : une précision de suivi à l’échelle du mètre, sans épuiser les batteries des capteurs.
Mais c’est l’intégration de l’AUV qui change véritablement la donne.
Mobile, intelligent et rechargeable, le véhicule agit comme un chef d’orchestre du réseau. Grâce à une optimisation continue de sa position — calculée à partir de la matrice d’information de Fisher —, il réduit le nombre de capteurs actifs, améliore la stabilité du suivi et prolonge la durée de mission.
Les simulations sont éloquentes : avec AUV, l’erreur de suivi reste contenue entre 0,9 et 2 mètres ; sans lui, elle peut dépasser 5 mètres.
« L’AUV agit comme un centre de fusion des données, réduisant la consommation d’énergie tout en renforçant la précision », résument les auteurs.
Les applications sont multiples : surveillance maritime, protection des infrastructures offshore, observation de la faune marine ou suivi environnemental.
En conjuguant mobilité, intelligence de réseau et optimisation énergétique, cette approche ouvre la voie à une nouvelle ère d’océans intelligents, où la technologie et la durabilité plongent dans la même direction.
NJC.© Info Joint target tracking using an autonomous underwater vehicle and underwater sensor networks for underwater applications
-----------------------------------------------------------------------------------------------------------------
07/11/25-English
When AUVs and Underwater Sensor Networks Join Forces for Precision Tracking
Image-R.E.News©
Beneath the surface, the marine world is anything but a docile playground. Between low visibility, capricious acoustic conditions, and critical stakes—from defense to offshore energy—tracking an object underwater often requires technological prowess.
Today, an international collaboration has just reached a decisive milestone: researchers have developed an innovative approach combining autonomous underwater vehicles (AUVs) and underwater sensor networks (USNs). Together, they promise to transform the real-time tracking of underwater targets.
Led by experts from the Ocean College of Jiangsu University of Science and Technology, Auckland University of Technology, and the Wuhan Maritime Research Institute, the study proposes a method that improves both tracking accuracy and the energy efficiency of the networks.
The secret? A next-generation algorithm: the Time-Delay Compensated Extended Kalman Filter (TD-CEKF), capable of compensating for time delays in acoustic signals while minimizing computational load. The result: meter-scale tracking accuracy without draining the sensors' batteries.
But it is the integration of the AUV that truly changes the game.
Mobile, intelligent, and rechargeable, the vehicle acts as the network's conductor. Thanks to continuous optimization of its position—calculated from the Fisher information matrix—it reduces the number of active sensors, improves tracking stability, and extends mission duration.
The simulations are telling: with the AUV, the tracking error remains contained between 0.9 and 2 meters; without it, it can exceed 5 meters.
"The AUV acts as a data fusion center, reducing energy consumption while enhancing accuracy," the authors summarize.
The applications are numerous: maritime surveillance, protection of offshore infrastructure, marine wildlife observation, and environmental monitoring. By combining mobility, network intelligence, and energy optimization, this approach paves the way for a new era of smart oceans, where technology and sustainability move in the same direction.
NJC.© Info Joint target tracking using an autonomous underwater vehicle and underwater sensor networks for underwater applications
------------------------------------------------------------------------------------------------------------------
07/11/25-NL
Wanneer AUV's en onderwatersensornetwerken hun krachten bundelen voor nauwkeurige tracking
Image-R.E.News©
Onder het wateroppervlak is de onderwaterwereld allesbehalve een ongrijpbare speeltuin. Door de slechte zichtbaarheid, onvoorspelbare akoestische omstandigheden en kritieke problemen – van defensie tot offshore energie – vereist het volgen van een object onder water vaak een technologische prestatie.
Vandaag heeft een internationale samenwerking een beslissende mijlpaal bereikt: onderzoekers hebben een innovatieve aanpak ontwikkeld die autonome onderwatervoertuigen (AUV's) en onderwatersensornetwerken (USN's) combineert. Samen beloven ze de realtime tracking van onderwaterdoelen te transformeren.
Onder leiding van experts van het Ocean College van de Jiangsu University of Science and Technology, de Auckland University of Technology en het Wuhan Institute of Marine Research, stelt de studie een methode voor die zowel de trackingnauwkeurigheid als de energie-efficiëntie van de netwerken verbetert. Het geheim? Een algoritme van de volgende generatie: het Time-Delay Compensated Extended Kalman Filter (TD-CEKF), dat de vertragingen van akoestische signalen compenseert en tegelijkertijd de rekenkracht minimaliseert. Het resultaat: nauwkeurigheid op meterniveau zonder de batterij van de sensoren leeg te trekken.
Maar het is de integratie van de AUV die de spelregels echt verandert. Mobiel, intelligent en oplaadbaar, fungeert het voertuig als de geleider van het netwerk. Dankzij continue optimalisatie van de positie – berekend met behulp van de Fisher-informatiematrix – vermindert het het aantal actieve sensoren, verbetert het de trackingstabiliteit en verlengt het de missieduur.
De simulaties zijn overtuigend: met de AUV blijft de trackingfout tussen de 0,9 en 2 meter; zonder kan deze meer dan 5 meter bedragen.
"De AUV fungeert als een datafusiecentrum, waardoor het energieverbruik wordt verlaagd en de nauwkeurigheid wordt verbeterd", vatten de auteurs samen.
De toepassingen zijn talrijk: maritieme bewaking, bescherming van offshore-infrastructuur, observatie van zeedieren en milieumonitoring.
Door mobiliteit, netwerkintelligentie en energie-optimalisatie te combineren, maakt deze aanpak de weg vrij voor een nieuw tijdperk van slimme oceanen, waarin technologie en duurzaamheid hand in hand gaan.
-----------------------------------------------------------------------------------------------------------------
Date de dernière mise à jour : 06/11/2025